
"теория предсказаний для решения задач энергосбережения"

- дайджест сайта
- Услуги аутсорсинга проектирования
- Аудит предприятия
- Техническая экспертиза
- Паспортизация предприятия
- Унификация оборудования гидравлического
- Модули гидравлические
- Гидроприводы на воде
- Установки очистки жидкости
- Сервораспределители
- Пропорциональные распределители для прессов
- Сервоклапаны для прессов
- Роторные распределители для вибромашин
- Гидропанели управления
- Стабилизаторы давления
- Гидрозамки
- Гидроцилиндры
.jpg)
Модернизация правильно растяжной машины усилием 1000 тн.
Модернизация позволяет обеспечить:1. Стабильное давление источника гидропитания в независимости от динамики усилий технологии растяжения (в том числе и спрыжки (резкого снятия нагрузки));
2. Обеспечение пропорционального управления главным цилиндром прессования, в том числе на малых перемещениях (доли миллиметра) и малых скоростях (доли миллиметра в секунду).
Реализация этих двух положений позволит решить все остальные требования технического задания, которые по отношению к этим двум задачам являются вторичными.
Модернизация источников гидропитания позволяет достичь стабильного давления, в независимости от динамики усилий, технологии растяжения (в том числе и спрыжки (резкого снятия нагрузки)), а также регулировать и стабилизировать скорости перемещения.
Источник гидропитания.
В качестве источника гидропитания предлагается модуль гидравлический с автоматическим изменением подачи по фактической потребности рабочей жидкости, определяемой сервозолотником (электрогидравлическим преобразователем пропорционального действия) расположенным на гидропанели. Плавное изменение скорости перемещения главного гидроцилиндра, (а также усилие) задается сервораспределителем. Стабилизация же положений, скоростей, ускорений главного цилиндра обеспечивается особым регулятором-стабилизатором.С развитием микропроцессорной техники серьезным образом облегчились задачи связанные с автоматизацией различных технологических процессов.
Так для создания системы стабилизации скорости обычно устанавливается два датчика: один датчик положения объекта управления, другой скорости. Со значений датчика положения в контроллере вычисляется первая производная (расчетная скорость), которая сравнивается со значениями датчика заданной скорости. Если одно из этих значений принять за уставочное, то разность этих двух значений есть рассогласование, которое посредством исполнительного звена должно минимизироваться. Но, к сожалению не все задачи можно решить на удобной микропроцессорной технике. Дело в том, что на вычислительные операции требуется какое-то время и если частота отклоняющих воздействий превышает способность регулятора к минимизации отклонений, то качество управления резко падает), система входит в колебательный режим (в разнос)).
В нашем случае мы имеем именно такую ситуацию, так как необходимо поддерживать скорость перемещения – 0,5 мм/с (паспортные скорости на подобных прессах оснащенных регулятором-стабилизатором).
В случаях таких достаточно-серьезных требований необходимо применение управления в режиме реального времени или как говорят в функции прямого управления.
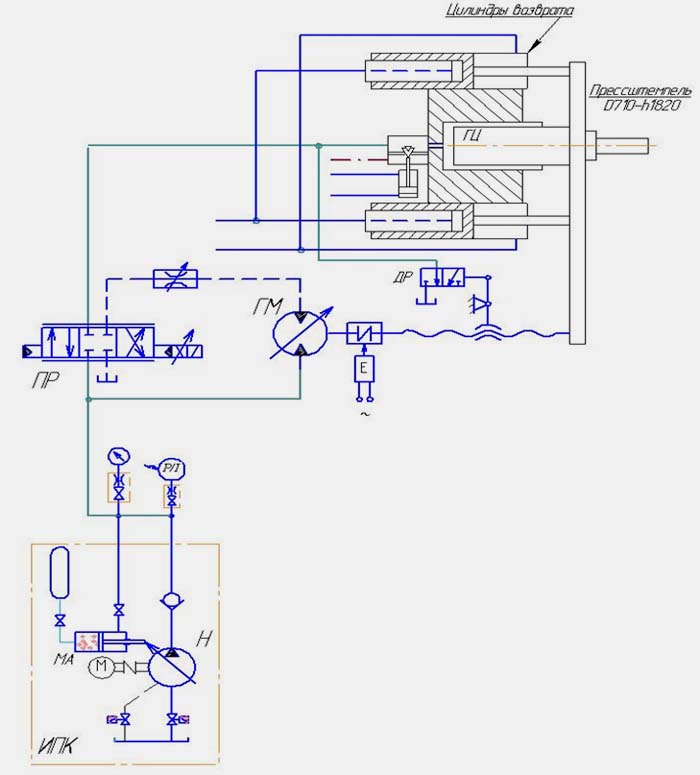
Рис.1. Схема регулятора-стабилизатора.
С помощью цифрового инкодера (аналогового переменного резистора, задания с компьютера и т.д.) оператор изменяет проходное сечение пропорционального распределителя ПР, что в свою очередь определяет скорость перемещения главного гидроцилиндра и частоту вращения гидромотора ГМ входящего в состав регулятора-стабилизатора.
Регулятор-стабилизатор РС работает следующим образом.
Пропорционально скорости главного гидроцилиндра ГЦ вращается также и прецизионный гидромотор ГМ. К валу гидромотора через муфту подсоединена винтовая пара (винт-гайка). Свободный конец винта закреплен к траверсе пресса. Гайка через коромысло сопрягается с пропорциональным дросселем Др, закрепленным на станине пресса. Если отклонения от заданной скорости нет, то гайка в винтовой паре (вне зависимости от скорости вращения винта) относительно станины пресса находится в неподвижном состоянии. Допустим переменый градиент физико-механических свойств растягиваемого материала (или спрыжка) спровоцировал отклонение от задаваемой гидромотором ГМ скорости ГЦ передающееся через сжимаемость рабочей жидкости. В этом случае гайка начнет менять свою координату. Причем пропорционально вышеуказанному математическому алгоритму, только без запаздывания, в режиме реального времени.
В данном регуляторе пропорциональный дроссель функционально только стравливает рабочую жидкость (не добавляет ее в главный цилиндр в случае дифицита). Смена направления потока (смену знака второй производной называют точкой срыва) опасна и если необходимо добавить скорость это делает не регулятор, а через управление с помощью инкодера (компьютера).
Выше изложены общие принципы управления в режиме реального времени. Возможно в конкретной реализации, мы сопряжем коромысло, выдающее нам уже посчитанное значение рассогласования пути и скорости, с цифровым датчиком и будем передавать сигнал на пропорциональный линейный электропривод дросселя Др расположенного в наиболее удобном месте.
Не следует данную картинку воспринимать как предлагаемое неизменное решение. Мы хотели показать принципы, определяющие получение требуемого результата, а реализации могут быть разные. Но именно подобный регулятор позволит получить паспортные скорости порядка 0,5 мм/с.
При необходимости получения скоростей ещё более медленных, необходимо будет заменить доместиковые уплотнения гидроцилиндров на современные (на основе фторопластов, полиамидов ит.д.), имеющие коэффициент трения в десятки раз меньший.
Схема гидравлическая принципиальная.
В приложении приведена примерная гидравлическая схема (принципиальная) предполагаемой модернизации правильно-растяжной машины усилием 1000 тн.Отличительными особенностями предлагаемой схемы является то, что:
• гидропривод задней и передней головки объединен, так как выполнен на принципах ультраустойчивости и позволяет одновременную работу любого сочетания механизмов;
• управление главным гидроцилиндром осуществляется посредством сервораспределителей (пропорциональных золотников);
• поддержание с высокой точностью контрольных параметров главного гидроцилиндра (давление (усилие), скорость) осуществляется посредством регулятора-стабилизатора;
• механизм центрирования полосы функционирует от гидропривода и автоматизирован (возможны различные варианты которые необходимо обсуждать);
• ходы гидроцилиндров механизма фиксации головки синхронизированы посредством гидравлических делителей потока;
• ходы гидроцилиндров механизма перемещения задней головки синхронизированы посредством гидравлического делителя потока;
• Система управления правильно-растяжной машиной 2-х уровневая.
Локальный уровень образован программируемыми контроллерами, связанными по промышленной сети. Верхний уровень реализован на базе промышленного компьютера, оснащенного СКАДА-системой. Обеспечивается управление механизмами по заданному алгоритму, отображение мнемосхемы и визуализация процесса обработки, возможность архивирования событий и хранение карт технологических.режимов.
Схема гидравлическая принципиальная ПРМ-1000.

630024 г. Новосибирск
тел./факс: (383)361-26-80, 361-25-58
тел./факс: (383)361-26-80, 361-25-58
e-mail: