
"теория предсказаний для решения задач энергосбережения"

- дайджест сайта
- Услуги аутсорсинга проектирования
- Аудит предприятия
- Техническая экспертиза
- Паспортизация предприятия
- Унификация оборудования гидравлического
- Модули гидравлические
- Гидроприводы на воде
- Установки очистки жидкости
- Сервораспределители
- Пропорциональные распределители для прессов
- Сервоклапаны для прессов
- Роторные распределители для вибромашин
- Гидропанели управления
- Стабилизаторы давления
- Гидрозамки
- Гидроцилиндры
.jpg)
Электрогидравлический регулятор мощности ДСП.
Электрогидравлический регулятор мощности ДСП - система автоматического регулирования горения дуги, обеспечивающая поддержание заданного значения вводимой в печь активной мощности, реализуемая посредством охвата главным контуром отрицательной обратной связи четырех взаимовложенных подсистем включающих в себя:1. программно-адаптивный регулятор электрического режима;
2. гидравлический механизм перемещения электрода;
3. электрогидравлический преобразователь пропорционального действия (гидроусилитель);
4. источник гидропитания.
В силу разнородности компонентов регулятора мощности и следовательно несопоставимости их размерностей появляется проблема осуществления с ними каких либо операций и расчетов. В этом случае используется теория подобия, когда в обезразмеренной форме мы можем делать с компонентами регулятора любые операции.
Так как в обобщенном виде наилучшим регулятором будет тот регулятор, у которого отношение состояния контрольного параметра Хсост к целевому Хцел. при любых внутренних возмущениях и внешних воздействиях будет всегда равен 1, то в безразмерной форме это запишется так:

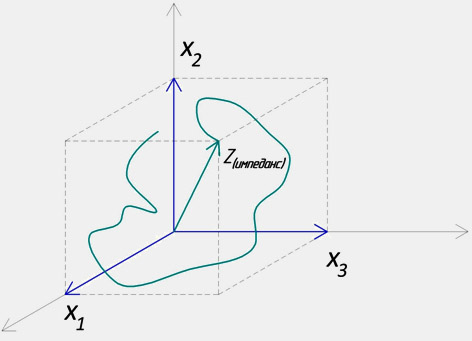
Итак, на рисунке показано пространство параметров {О Х1 Х2 Х3} каждый из которых является мерой одной из трех частных ошибок управления в составе трехмерного вектора ошибки управления (сигнала рассогласования).
В нашем анализе на оси ОХ1 откладывается отклонение от нормы (уставочной) давления источника гидропитания при переходных процессах, на оси ОХ2 - отклонения пропорциональности преобразования электрического сигнала (4-20мА) в гидравлический расход выражающийся в скорости (ускорении) гидроцилиндра электрододержателя. На оси ОХ3 - (отображается геометрическое отклонение от осевой линии рукава электрододержателя (вопрос жесткости)). Z (импеданс) - отклонение импеданса от уставочного значения, положение (рысканье) которого в фазовом пространстве обусловлено векторами {О Х1 Х2 Х3}.
Понятно, что идеальному режиму соответствует начало координат, в котором все три частные ошибки управления равны 0.
Критерий следующий. Если предположить, что радиус - вектор отклонения заданного значения Х (при управлении режимом печи поддержания импеданса) монотонно сводится к нулю, то очередность сведения к нулю его "компонент - составляющих" определяет приоритетность (значимость) необходимости стабилизации этих компонент.
Если это так, то всегда существует компонента вектора ошибки, которая своим рысканьем генерирует рысканье других компонент (в силу многокаскадности регулятора). Такая компонента называется системообразующей. Именно с этой компоненты необходимо добиваться монотонности убывания (либо вообще исключить возможность ее отклонения), тем самым мы стабилизируем и остальные компоненты (либо закладываем основу их стабилизации). Такой подход - есть основа высококачественного управления, так как он осуществляется по полной предсказуемости управляемой системы.
Полная предсказуемость управляемой системы связана с кибернетическим понятием "ультраустойчивость" системы получение которой задача каждого инженера автоматчика.
И если удается создавать ультраустойчивую систему от каскада к каскаду, мы серьезнейшим образом упрощаем себе задачу разработки программно-адаптивного регулятора электрического режима, так как алгоритм сводится к примитивному арифметическому действию вычитания из значения уставки значение состояния.
Итак, анализ вектора состояния структуры регулятора мощности в динамике позволяет утверждать, что рабочее давление источника гидропитания обладает системной (всеобщей) значимостью, не стабилизировав давление рабочей жидкости бесполезно стабилизировать другие компоненты.
Полной аналогией в бытовом плане является напряжение питающей сети. Если оно не стабильно, преждевременно сетовать на низкое качество телевизора, радио, компьютера, и т.д., так как их качества могут быть определяемы, только когда нет претензий к питающей сети. В обыденной жизни это банальность, однако, в индустриальных системах не редкость, когда узкие специалисты - механики, электронщики, программисты и т.д. упрямо копошатся каждый в своей подсистеме, что-то там настраивая, не понимая, что помеха им идет с другого уровня.
1. Источник гидропитания регулятора (групповой);
2. Электрогидравлический преобразователь пропорционального действия (гидроусилитель). Система "золотник-гидроцилиндр";
3. Система "цилиндр-рукав электрододержателя";
4. Алгоритм электрического режима.
Далее мы рассмотрим эту систему как целостность, что позволит нам выйти на формирование оптимальных алгоритмов регулятора электрического режима. Отладка такой системы также весьма упростится.
Но прежде чем заняться оптимизацией системы, разберемся, что мы будем подразумевать под "системой".
Согласно определению "Советского энциклопедического словаря" под системой понимается множество элементов, находящихся в отношениях и связях друг с другом, образующих определенную целостность, единство.
Во "Введении в кибернетику" (У.Росс Эшби) сказано более определенно - "каждая реальная детерминированная "машина" или динамическая система должна соответствовать замкнутому однозначному преобразованию".
Под замкнутостью понимается то, что система при любых преобразованиях не порождает новых состояний, а под однозначностью - то, что каждое преобразование порождает одно и только одно состояние.
Из вышесказанного следует то, что проектируя регулятор мощности, мы не должны допускать во вложенных компонентах этого регулятора колебательные переходные процессы, так как согласно определению в моменты возникновения таких переходных процессов (изменения частоты) СИСТЕМА ПЕРЕСТАЕТ БЫТЬ "СИСТЕМОЙ"!
Иными словами с некоторой периодичностью такая система разваливается, и мы теряем управление для ведения, которого и формировалась система.
Теория предсказаний.
Так как любое управление есть процесс достижения целей на основе устойчивости по предсказуемости, то периодический развал системы или потеря управления также процесс, устремленный к неопределенным целям, уже не контролируемый субъектом управления. В технике чаще всего это процесс, направленный к гибели (поломке) системы.Каким же образом предотвращать периодический развал системы?
Какие еще есть модели управления помимо "регулятора управляемого ошибками" получивший неоправданно широкое распространение во всех сферах жизни.
Ответы на эти вопросы можно получить в "Математической теории информации", а именно в "Теории минимально-квадратичного сглаживания и предсказания" впервые изложенной Н. Винером и независимо от него академиком А. Колмогоровым в аналогичной теории "Интерполирование и экстраполирование стационарных случайных последовательностей".
"К сожалению, работы Винера и Колмогорова содержат несколько устрашающий математический аппарат, - винеровская книга в желтой обложке приобрела среди смущенных инженеров название "желтой опасности", и это воспрепятствовало широкому распространению и использованию, которых вышеупомянутая теория заслуживает". Эти строки, написаны К. Шенноном совместно с Г.Боде во введении к упрощенному изложению этой теории.
Мы, пользуясь этой теорией, упростим ее до конкретного частного случая, так как упрощенный вариант Шеннона и Боде "прост" относительно работ Винера, но далеко не так прост для восприятия как хотелось бы.
Итак, получение ультраустойчивости системы возможно на основе полного управления, которое осуществимо лишь по предсказуемости, т.е. знании будущего.
Формирование поведения, на будущее, основываясь на прошлом возможно лишь при выполнении трех условий:
1. Временные последовательности представляющие сигнал (а также шум) стационарны. Это значит, что статистические свойства сигнала (и шума) не изменяются со временем.
2. В качестве критерия ошибки приближения взято среднеквадратичное различие между действительным и желаемым.
3. Операция для предсказания и сглаживания предполагается линейной операцией над имеющейся информацией.
При соблюдении этих трех условий предсказание может быть охарактеризовано как линейное минимально-квадратичное предсказание и сглаживание стационарных временных последовательностей..
Одна из теорем Шеннона гласит, что "Мощность любого регулятора не может превосходить пропускной способности этого регулятора как канала связи".
Другая: - "если имеется физически осуществимый преобразователь сигнала (с какой угодно задержкой), то обязательно также может быть создан обратный к нему преобразователь. В совокупности этот тандем будет передавать сигнал без потерь в независимости от помех в рамках среднего значения мощности".
Из этих двух теорем можно сделать выводы, что при любых переходных процессах в технических системах происходит потеря передаваемой информации, и что, детерминировав систему, в частности переходные процессы, получив апериодическими, мы не потеряем в быстродействии, потому, что всегда есть возможность разработать для такой системы обратный преобразователь. Этот обратный преобразователь восстановит потерянную при переходном процессе информацию, благодаря чему передача информации любой природы - гидравлическая, механическая, электрическая…, перейдет от "передатчика" к "приемнику" без потерь (без фазового сдвига, без гистерезиса, без статической ошибки и т.д.).
Создание таких систем, процесс однозначно не формализованный, а творческий и называются такие тандемы у разных авторов по разному - "кодирующий преобразователь - обратный преобразователь" (У.Росс Эшби), "кодировщик-декодеровщик" (К.Шеннон), "предиктор-корректор" (П.Элиас), "инь-янь" в восточной философии, "явь-навь" в дохристианской ведической Руси.
Этой теорией мы и пользуемся при разработке электрогидравлических регуляторов мощности для дуговых сталеплавильных печей, а также и иного оборудования.

630024 г. Новосибирск
тел./факс: (383)361-26-80, 361-25-58
тел./факс: (383)361-26-80, 361-25-58
e-mail: